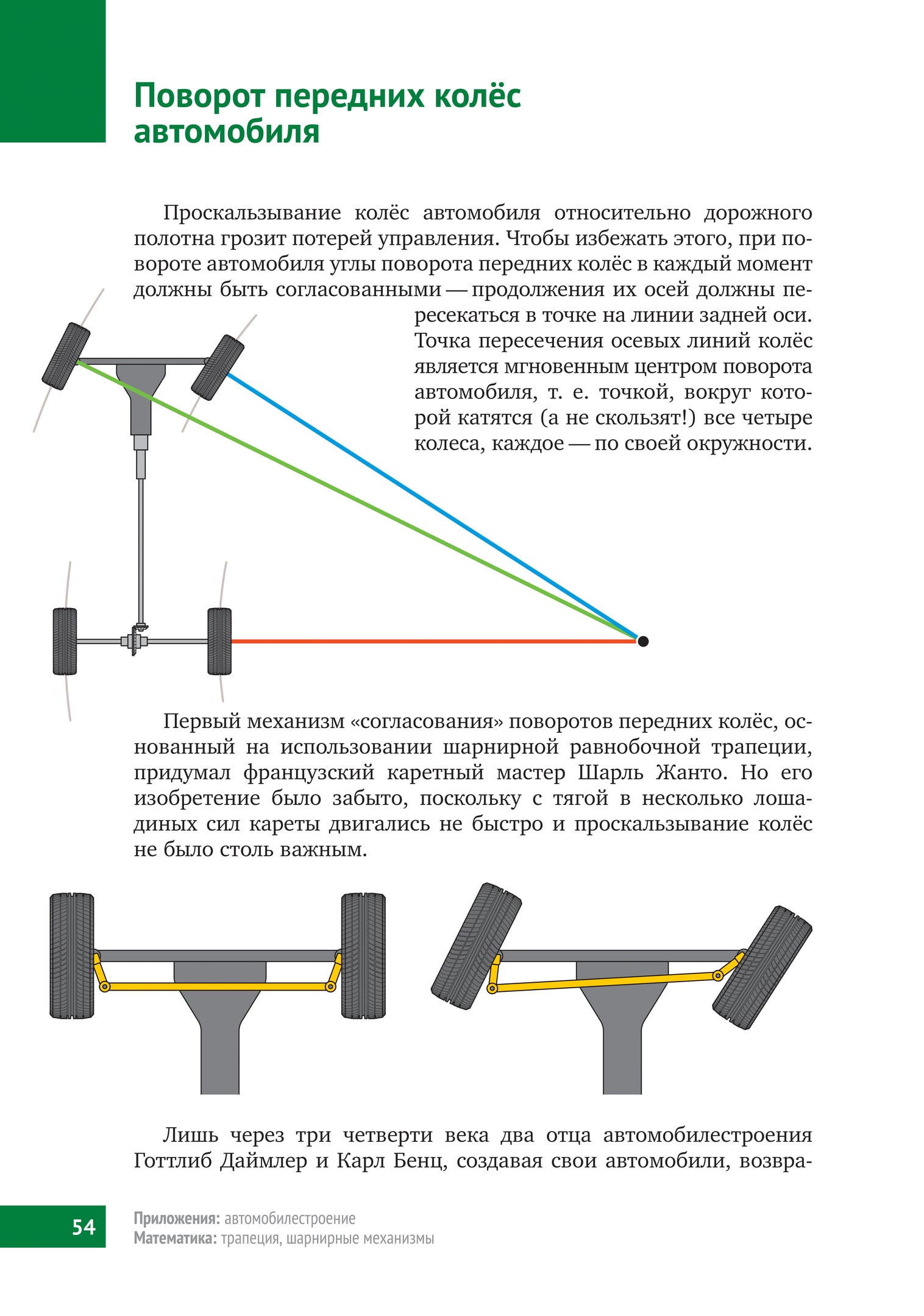
Проскальзывание колёс автомобиля относительно дорожного полотна грозит потерей управления. Чтобы избежать этого, при повороте автомобиля углы поворота передних колёс в каждый момент должны быть согласованными — продолжения их осей должны пересекаться в точке на линии задней оси. Точка пересечения осевых линий колёс является мгновенным центром поворота автомобиля, т. е. точкой, вокруг которой катятся (а не скользят!) все четыре колеса, каждое — по своей окружности.

Первый механизм «согласования» поворотов передних колёс, основанный на использовании шарнирной равнобочной трапеции, придумал французский каретный мастер Шарль Жанто. Но его изобретение было забыто, поскольку с тягой в несколько лошадиных сил кареты двигались не быстро и проскальзывание колёс не было столь важным.


Лишь через три четверти века два отца автомобилестроения Готтлиб Даймлер и Карл Бенц, создавая свои автомобили, возвращаются к трапеции Жанто. В 1889 году Даймлер получает патент на «способ независимого управления передними колёсами с разновеликими радиусами поворота». А в 1893 году Бенц получает патент на «устройство управления экипажей с тангенциальными к колёсам окружностями управления». С тех пор трапеция «управляет» автомобилем.
Конечно, за это время техника усложнилась. У большинства современных машин колёса ходят по высоте относительно друг друга, поэтому для управления ими плоский шарнирный механизм (трапеция) уже не подходит. Однако и в наши дни механизм, поворачивающий передние колёса автомобиля, называется рулевой трапецией.
Современные конструкторы научились поворачивать и задние колёса автомобиля, эта возможность реализована в некоторых моделях. По сравнению с описанной классической схемой, у автомобиля с функцией согласованного поворота всех четырёх колёс существенно уменьшается минимальный радиус поворота.
Рассматривая поведение колёс автомобиля при повороте, нельзя не отметить ещё одну проблему геометрического толка.
При повороте колёса на одной оси катятся по дугам окружностей разных радиусов, поэтому должны отличаться и пройденные ими пути.
В изображённой на первом рисунке ситуации у автомобиля ведущая ось — задняя, передние колёса независимы и будут свободно крутиться, каждое со своей скоростью.
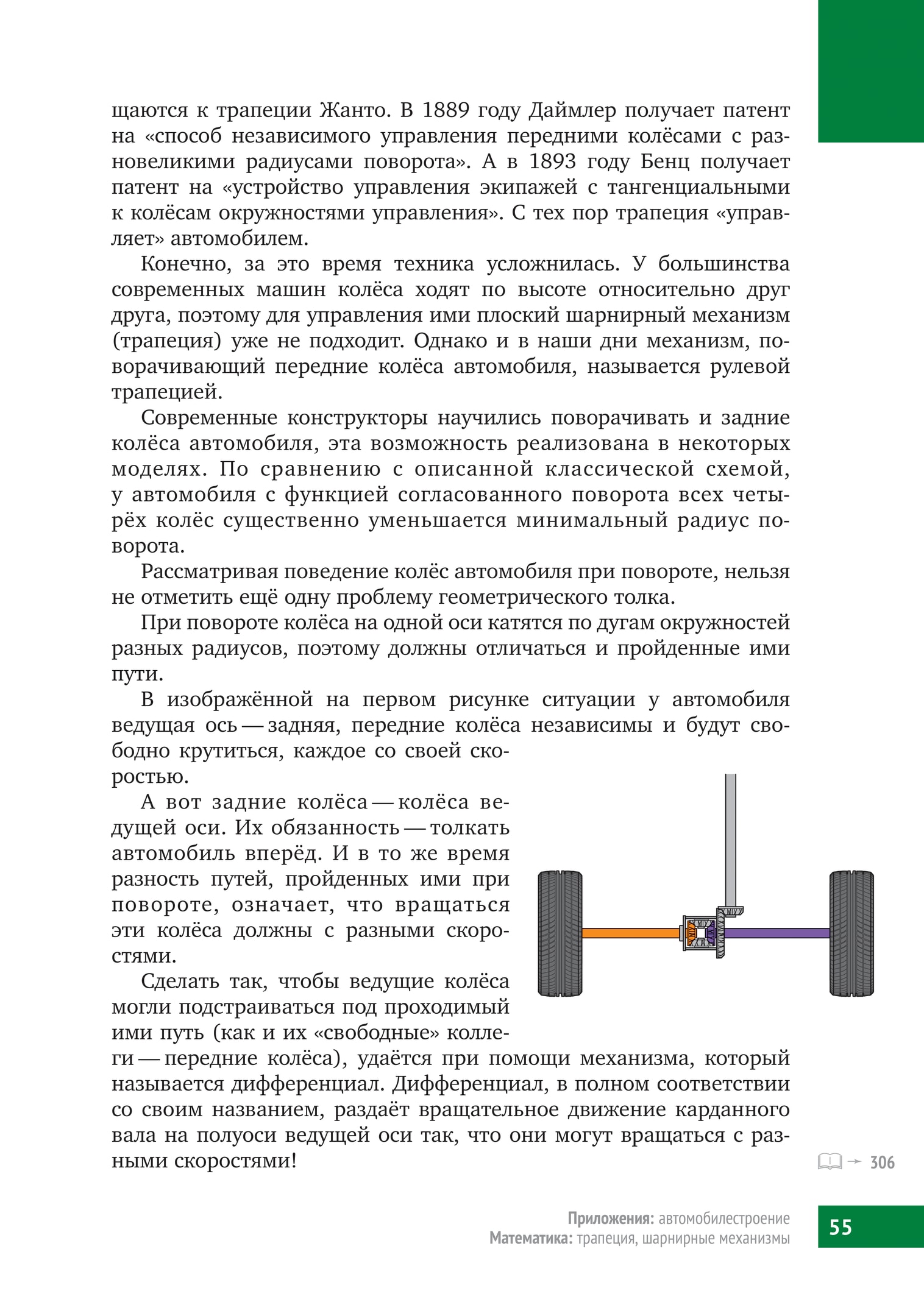
А вот задние колёса — колёса ведущей оси. Их обязанность — толкать автомобиль вперёд. И в то же время разность путей, пройденных ими при повороте, означает, что вращаться эти колёса должны с разными скоростями.

Сделать так, чтобы ведущие колёса могли подстраиваться под проходимый ими путь (как и их «свободные» коллеги — передние колёса), удаётся при помощи механизма, который называется дифференциал. Дифференциал, в полном соответствии со своим названием, раздаёт вращательное движение карданного вала на полуоси ведущей оси так, что они могут вращаться с разными скоростями!


Механизм рулевой трапеции на основе шарнирной равнобочной трапеции часто называют четырёхугольником Жанто в честь придумавшего его мастера. Но в этом простом механизме даже теоретически нельзя добиться идеального результата: чтобы при повороте передних колёс точка пересечения продолжения их осей всё время находилась на продолжении задней оси.
С достаточной для практических нужд точностью это достигается: стороны трапеции Жанто подбираются так, чтобы точка пересечения передних осей находилась «рядом» с прямой задней оси. Теорию четырёхугольника Жанто изложил профессор Московского университета Болеслав Корнелиевич Млодзеевский в небольшой работе «К теории управления в автомобилях» (Вестник инженеров, 1917, № 2, стр. 37—41).